Tvoříme 3D model: Díl 1. - Plánování trasy a 2D mapa
Plánování tras pro automatický let u bezpilotních letadel je znám již z doby MikroKoptera a jiných průkopníků v oblasti dronů. Pojďme si osvěžit nedávnou historii a představit si nástroje, které jsou k dispozici dnes.
Tvorba 2D a 3D modelů.
Pro základní představu o práci je třeba nejprve vysvětlit, jak celý proces probíhá. Pokud chceme vytvořit 2D nebo 3D model, musíme určitou oblast nalétat - nafotit (v tomto článku píšeme pouze o standardním snímkování). Následně pořízené fotografie zpracováváme.

Z toho vyplývá, že potřebujeme software pro plánování trasy a software pro zpracování pořízených fotografií. U některých výrobců se tyto dvě problematiky prolínají, jsou součástí jednoho softwarového balíčku.
Každý si dovede představit, že nálet může probíhat různě. Extrém je ručně, další možností je naprogramování drona s objektivem kolmo dolů. A řekněme poslední možností je optimalizovaná trasa s různě nastaveným úhlem kamery - objektivu. Jde o to, aby se objektiv podíval pokud možno všude. Do dutin, pod přístřešek...
Kvalitě nasnímání potom odpovídá kvalita 2D a 3D modelu.
Jak je to se softwary?
Pro jednoduchost bych je rozdělil do dvou skupin. Pro geodety a pro běžné uživatele.
Co znamená slovo geodet všichni víme. Co je běžný uživatel? Můžeme si představit člověka zodpovědného za průběh a dokumentaci stavby. To znamená člověka, který je schopen oblast nalétat, během pár chvil i v terénu vyrobit potřebnou dokumentaci. Na základě ní dělat i případná okamžitá rozhodnutí. Především takový nástroj vám v tomto článku představíme.
Jak se plánovaly trasy?

První mise jsme plánovali už v roce 2011 - 2012, v té době to byl zázrak.
Od té doby uteklo spousty vody. Drony i obslužné aplikace se neustále zdokonalují.
Prvním plánovačem pro letadla DJI byl software Groundstation 4.0 pro Windows.

Pro let bylo nutné použití externího zařízení Datalink a naplánovat tak let pro řídící jednotky Wookong, Ace, NAZA a A2. Bylo v něm mnoho nedostatků, hlavním byl chod v pásmu 2.4 GHz (používaný také pro řízení RC soupravami, později i pro video) a tím pádem tedy poměrně malý dosah Datalinku, což znemožňovalo nalétat větší plochy.

Mezi nejznámější aplikace pro mise mimo výrobce DJI patří komplexní řešení od Pix4D.

Kromě aplikace pro mobilní zařízení Pix4D Capture má v nabídce několik software na vyhodnocování nasnímaných fotografií, nejznámější je Pix4D Mapper.
Dalším velmi rozsáhlým software na plánování je software UGCS.

Software UGCS má obslužnou aplikaci pro mobilní zařízení, které je připojené k ovladači letadla. Přes wi-fi se spojí v místní síti s PC a celá mise se plánuje a odlétá v počítači na platformách Windows, MAC, LINUX.
Další plánovače jsou např. Drone Deploy, SkyCatch, Mission Planer.
Novou generací ve vývoji je software pro iOS DJI Ground Station Pro (odkazující názvem na původní GroundStation 4.0, avšak pro novější letadla již není třeba mít speciální hardware), který je pro tablety a postupem času a novějšími aktualizacemi se dále zdokonaloval včetně podpory většiny řídících jednotek aktuálních dronů od DJI. Misi lze plánovat v tabletu, nebo naimportovat misi předem vytvořenou v PC.
Co používáme dnes?
Software, který kombinuje plánování trasy a zároveň zpracovává data je novinka DJI TERRA

Software pro notebooky nebo pevné počítače, kde obsluha má kabelem pevně propojen ovladač od drona s počítačem, na kterém naplánuje misi, odlétá, může využít realtimové zobrazení 2D mapy a po přistání importuje data z dronu do aplikace a vytvoří model, který požaduje. Výstupem může být 2D mapa GEOTIFF s reportem výškového profilu, multispektrální mapa, 3D model OBJ nebo PLY, nebo mračno bodů LAS.
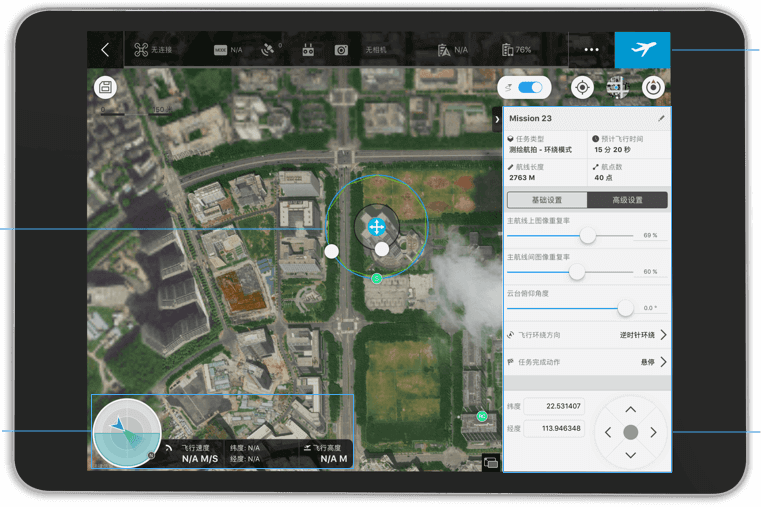
Během letu se Terra chová podobně jako DJI GO 4. V horní liště je stavový panel, živá mapa s aktuální pozicí letadla, kde se v případě vyžádání vykresluje během letu 2D mapa.

Software Terra je velmi dobře optimalizovaný pro prohlížení velkých souborů. Je možné i exportovat do výše zmíněných formátů a prohlížet v libovolném softwaru. Aktuálně jsou plně podporovány všechny modely Phantom 4. Tedy i Pro, Advanced, RTK a nejnovější Multispectral. Podporu dalších letadel očekáváme brzy.
Při testování DJI TERRA jsme záměrně zvolili celkem složitý testovací objekt: Rodinný dům ve svahu s mnoha terénními úpravami, navíc obklopený listnatými stromy

Pro účely 3D modelu nestačí vždy jen kolmé fotografie. TERRA nabízí možnost i šikmého snímání OBLIQUE. To je metoda, kterou budeme používat. Snímaný objekt je oblétáván shora + ideálně ze čtyř stran. Jednotlivé boční nálety je možné naletět najednou, nebo je odlétat jako jednotlivé mise v případě např. nepřízně počasí, výměny akumulátoru apod.

Všechny potřebné parametry volíme před zahájením letu. Mezi základní patří výška a rychlost letu, kurz (směr letu), vertikální a horizontální překryv. V nastavení kamery volíme poměr stran, režimy snímané scény a náklon kamery při šikmém letu. Při této misi jsme nastavili náklon kamery na 50°

Nejprve jsme pomocí Terry z kolmých snímků vytvořili 2D mapu ve vysokém rozlišení včetně výškového profilu:


Trasu máme nalétanou, fotografie pořízené. V dalším díle si ukážeme tvorbu a export několika druhů 3D modelů, měření vzdálenosti, objemu a plochy.
.